2023-04-13
- Video
- Automotive

In this demo, we demonstrate the closed-loop functionalities of the AVP, showcasing a Driver-in-the-loop configuration and perception model and retrieving sensor data in real time. The Autonomous Vehicle Platform (AVP) is a complete hardware/software, X-in-the-loop capable platform (where X can be Model, Driver, Software, Hardware) allowing researchers and developers to design, train, and evaluate the performance of autonomous systems in a virtual environment. The platform includes several pre-configured and detailed 3D models of a sample city, vehicle dynamics, and sensor models and provides Perception, Fusion, and Driving functions as well. With complete control over weather conditions and traffic densities, developers can test autonomous vehicle behavior in various situations. Users can also collect raw data from the provided sensors, which include RGB camera, segmentation camera, LiDAR, radar, IMU, and GNSS, and uses them to further develop perception, fusion, and driving models. Finally, data on the vehicle's performance, such as speed, braking, and steering, can also be retrieved to identify improvement areas and ensure that the vehicle's behavior meets safety and performance standards.
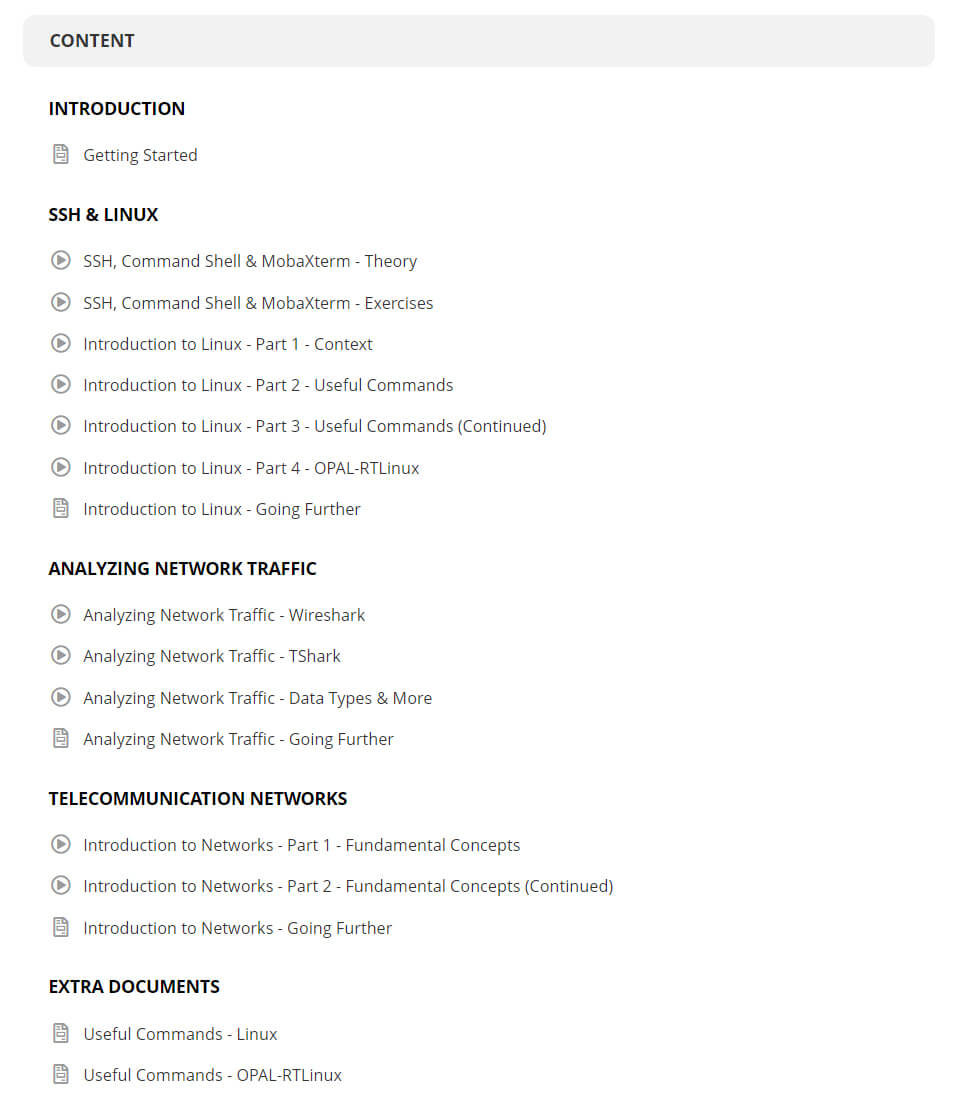
This course offers a diverse blend of essential background knowledge designed to equip you with the skills needed for any project related to communication protocols and/or Linux.
This course was originally built to provide background knowledge for the OPAL-RT and EXata co-simulation setup, but since then, it has been improved to yield a bigger reach.
You will learn more about the following:
– Shell Terminal, SSH and MobaXterm
– Linux, and the history of Linux at OPAL-RT
– Analyzing network protocols using TShark and Wireshark
– Understanding better the fundamental concepts of networks
– and more!
Note: All self-paced e-Learning courses are available for free for OPAL-RT customers.
This course introduces OPAL-RT systems and applications using RT-LAB. This course is a prerequisite for eMEGASIM, eFPGASIM, and ePHASORSIM. RT-LAB is used in a variety of domains, including power systems, power electronics, automotive applications, aerospace, mechatronics and more.
Prerequisites:
• Basic knowledge of Matlab®/Simulink®
GOALS:
– Learn the fundamentals of real-time simulation
– Get started with RT-LAB Software
– Understand when and how to use distributed and parallel real-time simulation
– Connect models with I/Os
Note: All self-paced e-Learning courses are available for free for OPAL-RT customers.

This course teaches the basics of the HYPERSIM® real-time simulation software platform and its operating principles.
GOALS:
– Understand the operating principles of HYPERSIM®
– Use ScopeView to analyze results
– Build and run a number of control and power system simulation cases showing the capabilities of HYPERSIM®
– Connect models with I/Os
Note: All self-paced e-Learning courses are available for free for OPAL-RT customers.

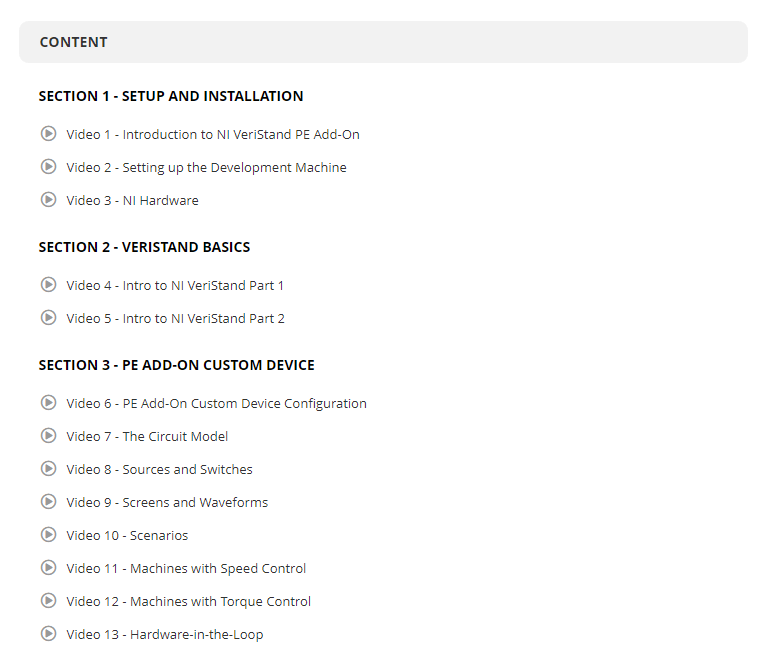
This course covers the configuration of a real-time system using the OPAL-RT Power Electronics Add-On for NI VeriStand on the National Instruments hardware platform.
Goals:
– Learn the fundamentals of real-time simulation
– Review the basics of NI VeriStand and the NI hardware platforms
– Understand FPGA-based simulation of power electronics using the eHS solver
Note: All self-paced e-Learning courses are available for free for OPAL-RT customers.

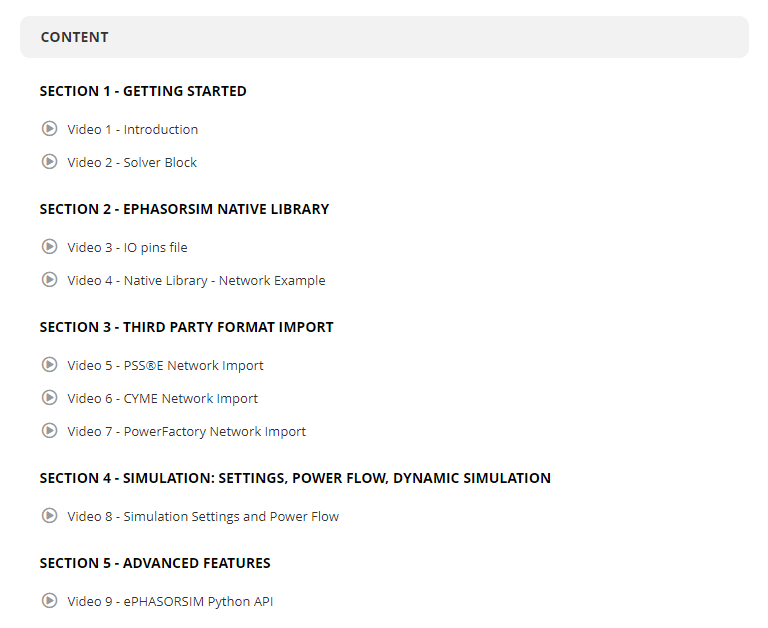
This course is intended for new ePHASORsim users who want to learn Phasor Domain real-time simulation. ePHASORsim simulates electro-mechanical transient stability phenomena of very large power grids with thousands of buses, generators, transformers, transmission lines, loads and controllers.
Prerequisites:
• OP-101: RT-LAB – Real-Time Simulation Systems Fundamentals
GOALS:
– Understand the concept of Phasor Domain simulation features, benefits and limitations
– Import PSS/E, DIgSILENT or other model-based design tools into ePHASORsim
– Connect I/Os and communication buses with ePHASORsim
– Learn about the interaction of ePHASORsim and RT-LAB
Note: All self-paced e-Learning courses are available for free for OPAL-RT customers.

This course is intended for power electronics and control engineers who want to perform fast power electronics real-time simulation using the combined power of FPGA and OPAL-RT’s unique dedicated solver eHS.
Prerequisites:
• OP-101: RT-LAB – Real-Time Simulation Systems Fundamentals
GOALS:
– Discover the features, flexibility and limitations of FPGA for power electronics real-time simulation
– Understand the overall architecture of real-time simulator between processors and FPGA
– Experience first-hand power electronics real-time FPGA applications using eHS solver
Note: All self-paced e-Learning courses are available for free for OPAL-RT customers.

This course is intended for professionals who want to simulate power systems with ARTEMiS by converting their Simulink‘s SimPowerSystems™ based model into a complete HIL system.
Prerequisites:
• OP-101: RT-LAB – Real-Time Simulation Systems Fundamentals
GOALS:
– Learn how to run power systems models in real-time for HIL applications
– Take advantage of dedicated toolboxes for real-time simulation of power systems and power electronics
– Understand Artemis-SSN, State-Space Nodal solver, as well as its applications
– Learn how to improve the real-time simulation switching results with RT-EVENTS
– Learn how to adapt your SimPowerSystems model for real-time simulation
Note: All self-paced e-Learning courses are available for free for OPAL-RT customers.

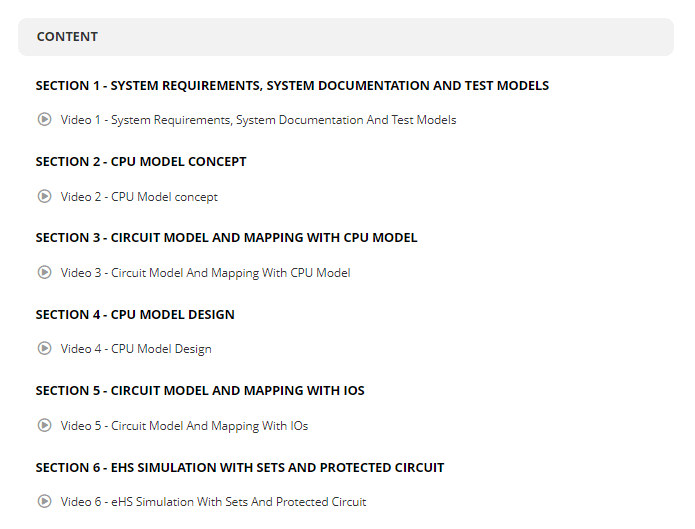
This course is intended for professionals who want to simulate power electronic circuits with our FPGA-based solver: eHS. This toolbox provides the flexibility and speed required for very fast power conversion applications for HIL simulation.
Prerequisites :
• OP-101 : RT-LAB – Real-Time Simulation Systems Fundamentals
GOALS:
– Learn how to run power electronic circuits in real-time for HIL applications
– Take advantage of FPGA high performance for solving power electronic circuits in real-time
– Learn how to design your power electronic circuits with the OPAL-RT Schematic Editor
– Learn how to implement a control algorithm on CPU for your power electronic circuits
– Learn how to interface your power electronic circuits design with external controller
– Learn how to simulate faults on power electronic converter circuits
Note: All self-paced e-Learning courses are available for free for OPAL-RT customers.
This course is intended for new ePHASORSIM users who want to learn Phasor Domain real-time simulation. ePHASORSIM simulates electro-mechanical transient stability phenomena of very large power grids with thousands of buses, generators, transformers, transmission lines, loads and controllers.
Prerequisites:
• OP101: RT-LAB – Real-Time Simulation Systems Fundamentals
GOALS:
– Understand the concept of Phasor Domain simulation features, benefits and limitations
– Import PSS/E, DIgSILENT or other model-based design tools into ePHASORSIM
– Connect I/Os and communication buses with ePHASORSIM
– Learn about the interaction of ePHASORsim and RT-LAB
Note: All self-paced e-Learning courses are available for free for OPAL-RT customers.
This course covers how to use the FPGA-Based electric hardware solver (eHS) on the Power Electronics Add-On for NI VeriStand, developed by OPAL-RT, with NI’s VeriStand software to give a user the tools necessary to test power electronics and electric motors in real-time.
GOALS:
– Learn the fundamentals of real-time simulation
– Review the basics of NI Veristand and the NI hardware platforms
– Understand FPGA-based simulation of power electronics using the eHS solver
– Configure the real-time system using the Power Electronics Add-On for NI Veristand
– Connect to physical systems using I/O channels
Note: All self-paced e-Learning courses are available for free for OPAL-RT customers.
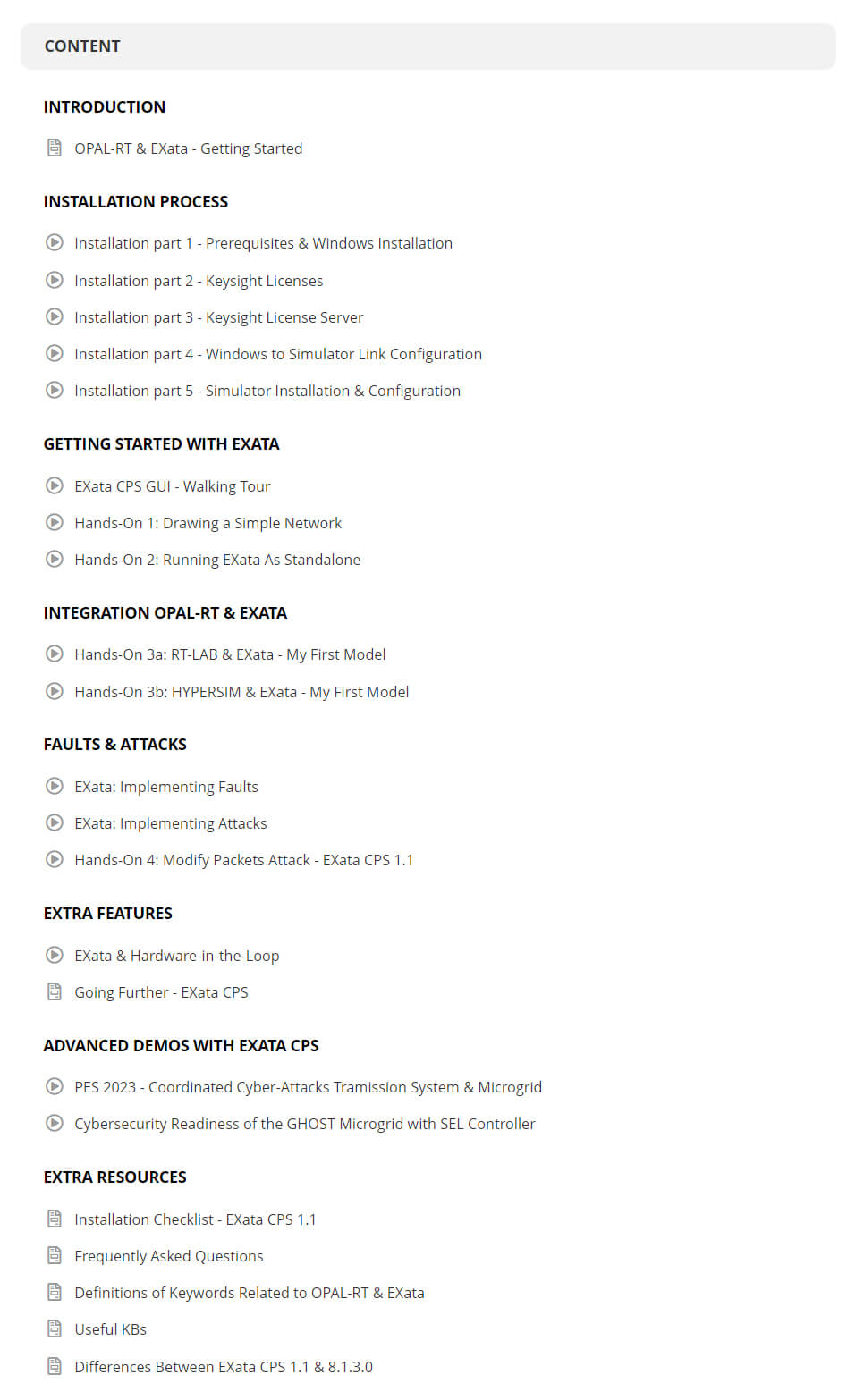
This course covers the cyber-physical co-simulation setup between Keysight’s EXata CPS and OPAL-RT’s RT-LAB / HYPERSIM. Learn how to install EXata CPS on your computer, license the software, and go through step-by-step examples on how to implement faults, cyber attacks and integrate both software.
GOALS:
– Learn how to install and configure the EXata CPS software
– Go through different step-by-steps showing how to couple the two software
– Implement your first cyber-attacks and analyze the impacts
– Connect an external device to your co-simulation setup
Note: All self-paced e-Learning courses are available for free for OPAL-RT customers.
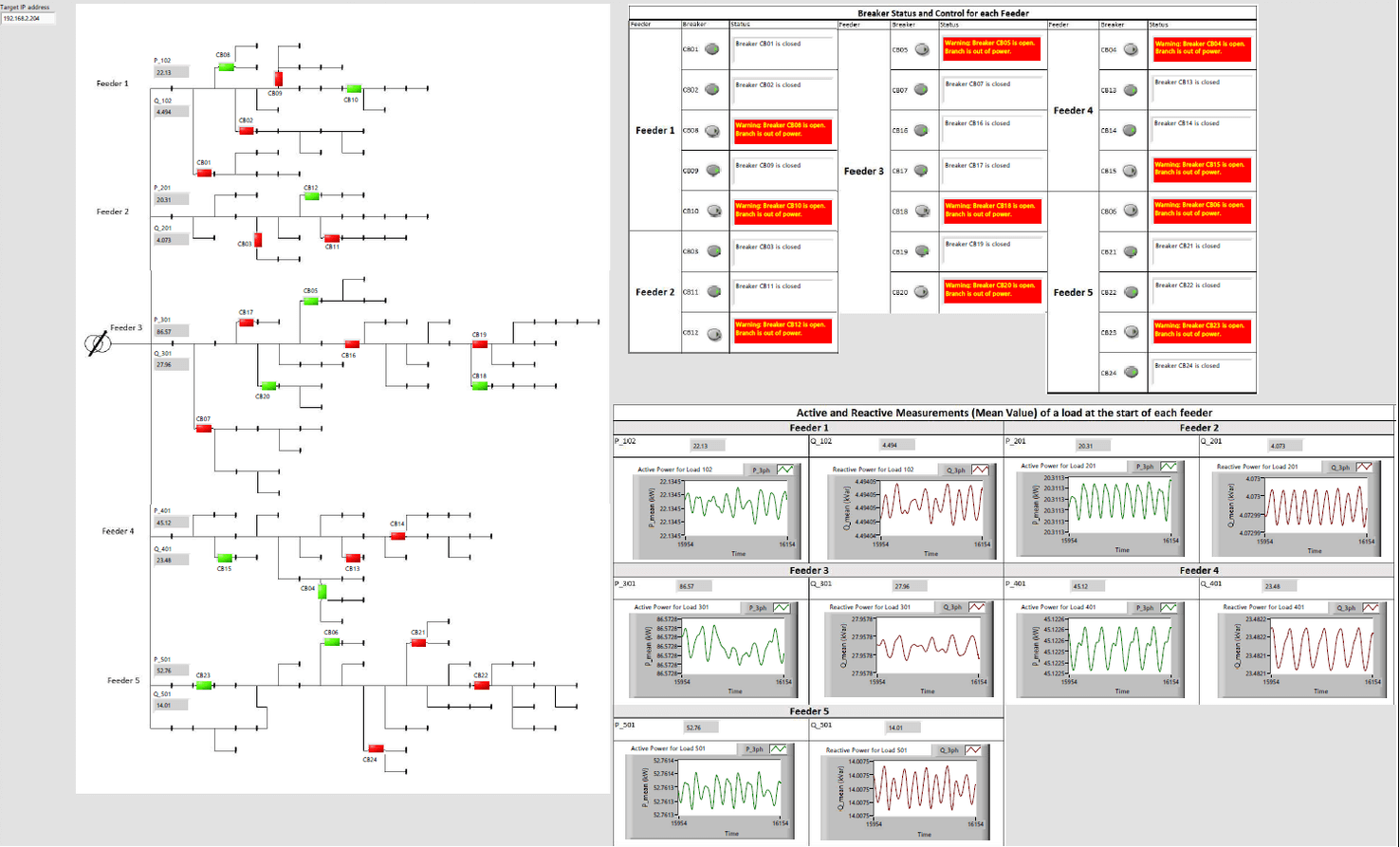
When HYPERSIM’s in-schematic signal monitoring is not enough, when networks are very large, or when more types of widgets are required, or even for training purposes, it may be practical to build distinct dashboards with a more concise organization of the information. Several tools can be used to achieve this, such as NI LabVIEW. Information is sent in real time from HYPERSIM using compatible communication protocols such as TCP/UDP or OPC UA and displays are refreshed every few milliseconds.